Active Robots
The following robots are currently used by Team Hector.
Athena 🔗
| Specifications | |
|---|---|
| Weight | 50 kg |
| Dimensions (L x W x H) | 70cm x 50cm |
| Speed | 1.5 m/s |
| Flipper DoF | 4 (Each independently) |
| Manipulator DoF | 7 (+ Gripper) |
| LiDAR | 2 Livox Mid-360 (Fixed) |
| Cameras | 2 240° Cameras, 3 RGB-D Cameras, Thermal Camera |
| Additional Sensors | IMU, Force/Torque Sensor (Endeffector) |
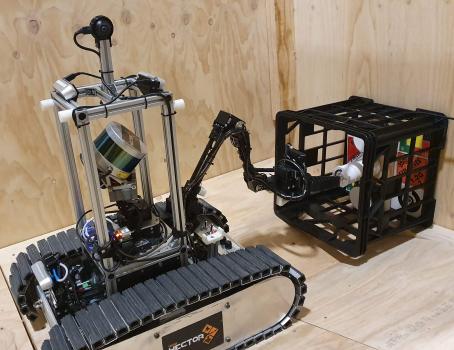
Athena is a highly mobile tracked rescue robot developed by Team Hector for autonomous exploration and manipulation in complex terrain.
With four independently actuated flippers and a full-body crawler design, it achieves superior mobility on rough terrain compared to its predecessor Asterix. Its compact 7-DoF manipulator combines long reach with high payload capacity, lifting up to 7 kg close to the base and 2.9 kg at full extension. A force–torque sensor at the end-effector enables research on compliant and autonomous manipulation.
Athena was deployed for the first time in 2025, competing successfully at both the RoboCup German Open and the RoboCup World Championship in Salvador, Brazil.
emergenCity Swift 🔗
| Specifications | |
|---|---|
| Weight | 30 kg |
| Dimensions (L x W x H) | 63cm x 55cm x 30cm |
| Speed | 3 m/s |
| LiDAR | 2 Livox Mid-360 (Fixed) |
| Cameras | 3 RGB-D Cameras, 3 Thermal Cameras |
| Additional Sensors | IMU, GNSS |
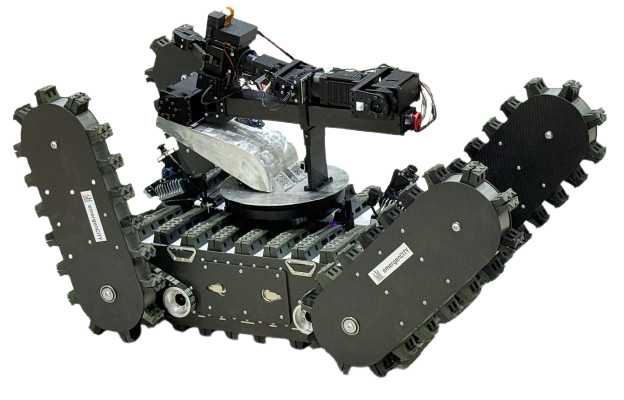
The emergenCITY Swift is used for research on autonomous assistance functions for urban search and rescue robots as part of the emergenCITY research center. Designed for fast exploration in urban environments, it features a compact base platform with rubber wheels and independently driven motors, allowing agile movement and turning on the spot in confined areas.
Mounted on the small wheeled base, the autonomy box developed by Team Hector integrates two LiDARs for 3D mapping, two RGB-D cameras with overlapping fields of view, and three thermal cameras (front, left, right) for victim detection.
The robot was successfully deployed during ENRICH 2025, where it explored a nuclear power plant and located radiation sources.
DRZ Telemax 🔗
| Specifications | |
|---|---|
| Weight | 97 kg |
| Dimensions (L x W x H) | 81cm x 40cm x 78cm |
| Speed | 1.1 m/s |
| Flipper DoF | 4 |
| Manipulator DoF | 6 (+ Gripper) |
| LiDAR | VLP-16 (Rotating) |
| Cameras | 360° Camera, 2 RGB-D Cameras, Wide-Angle Camera |
| Additional Sensors | IMU, GNSS |
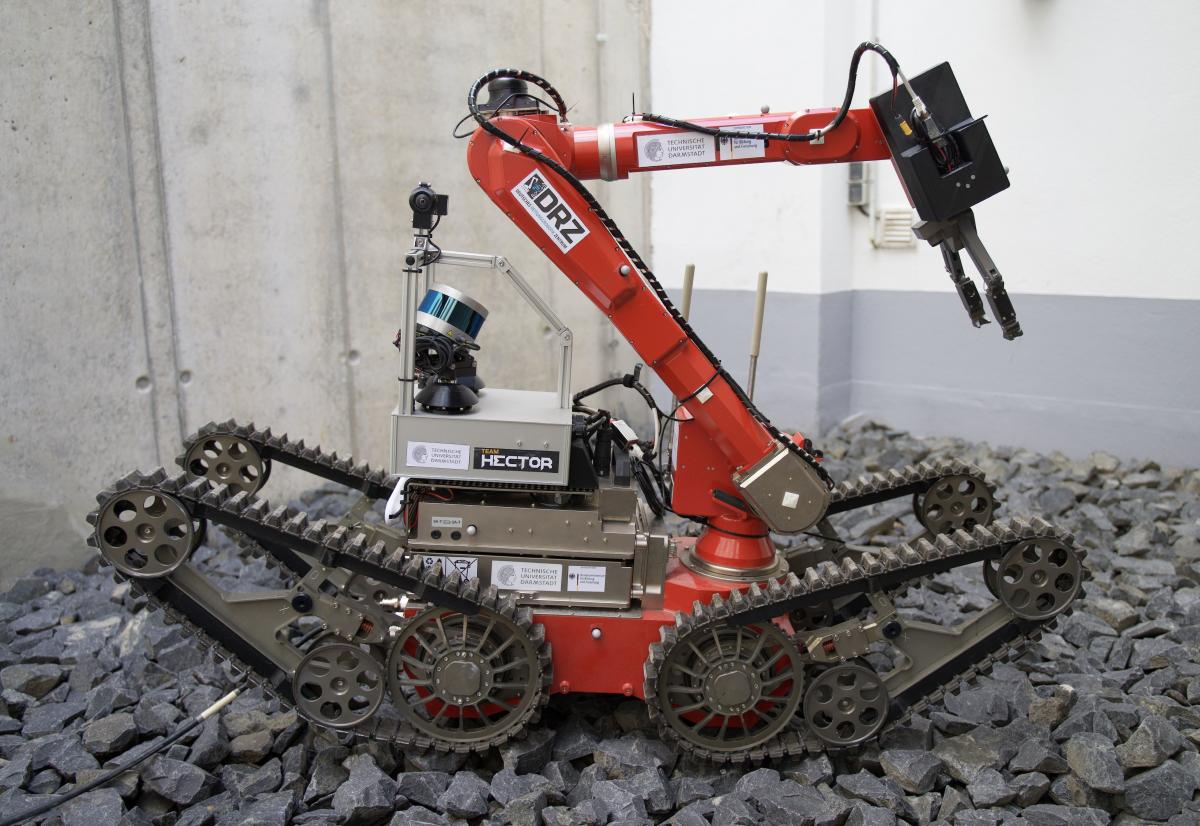
The Telemax Hybrid by Telerob is used for research of autonomous assistance functions for urban search and rescue robots as part of the German Center for Rescue Robotics. The base platform is equipped with rubber tracks and four flippers which can modify the track geometry in order to overcome obstacles.
In a compact configuration, the robot has the dimensions of 0.81 m x 0.40 m x 0.78 m and weighs 80 kg. Fully stretched out, the arm can reach more than 1.5 m and carry 7.5 kg. Standing on its flippers the robot can reach a height of 2.5 m. Thereby, enabling versatile manipulation capabilities.
The tracked platform carries a modular autonomy box developed by Team Hector equipped with a continuously rotating lidar to create 3D point clouds, an omnidirectional camera and a RGBD-camera.
The robot was successfully deployed during Enrich 2019, exploring a nuclear power plant, locating radiation sources and saving a missing worker. The combination of high mobility, various sensing capabilities and advanced algorithms enabled Team Hector to win the mapping award.
DRZ Telemax also was deployed to multiple real missions in cooperation with the DRZ.
emergenCity Scout 🔗

| Specifications | |
|---|---|
| Weight | 80 kg |
| Dimensions (L x W x H) | 94cm x 70cm x 84cm |
| Speed | 1.5 m/s |
| LiDAR | OS-0 (Fixed) |
| Cameras | Insta360 Pro 2 360° Camera, 3 RGB-D Cameras, Zoom Camera Thermal Camera |
| Additional Sensors | IMU, GNSS, Radar |
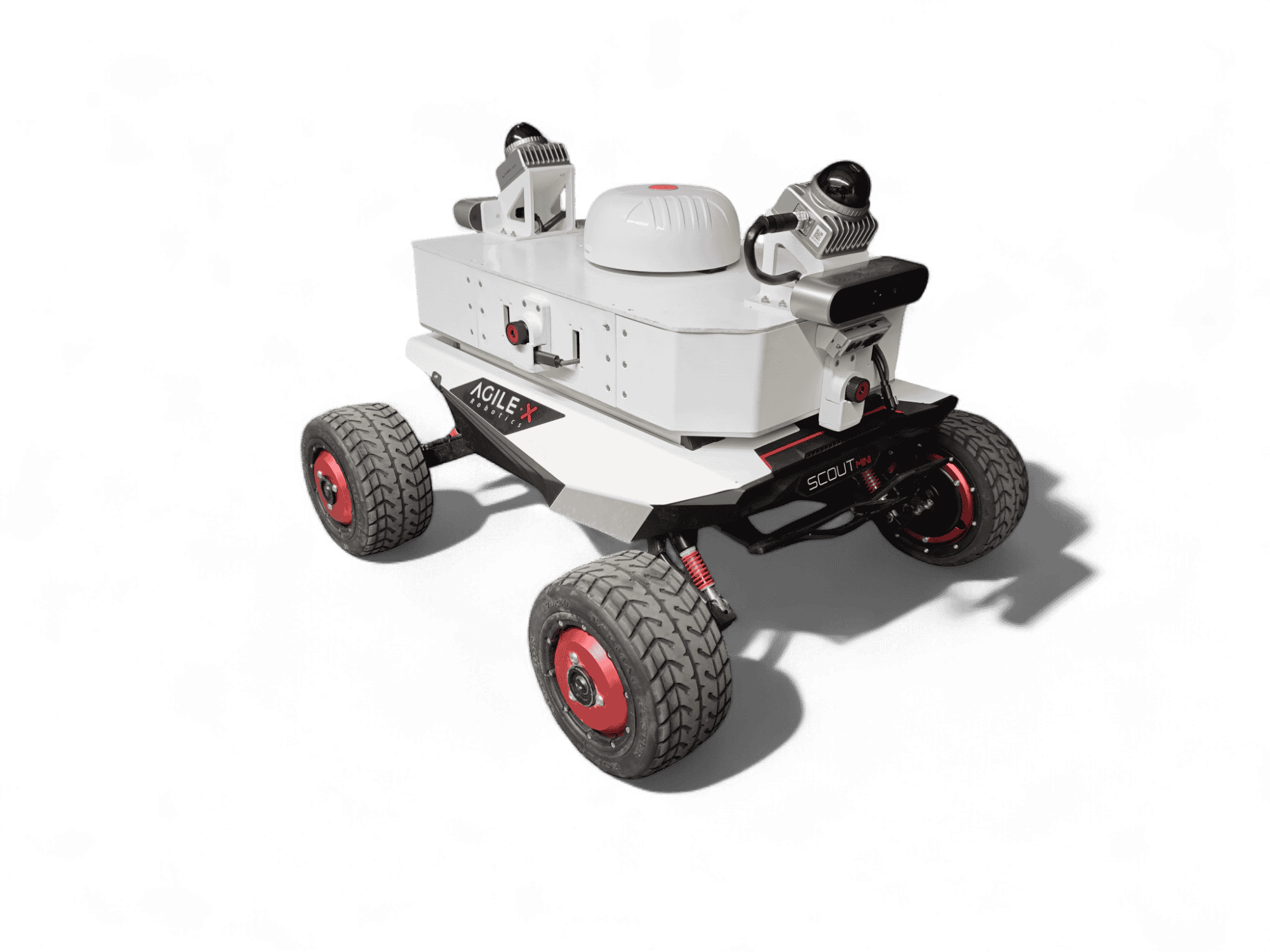
The emergenCITY Scout is used for the research of autonomous assistance functions for urban search and rescue robots as part of the emergenCITY research center. To enable fast exploration in urban environments, the base platform is equipped with rubber wheels.
On the medium-sized wheeled base, the emergenCITY Scout carries a modular autonomy box developed by Team Hector equipped with a fixed high-resolution lidar to create 3D point clouds, a high-resolution omnidirectional camera featuring six 4K sensors, two RGB-D cameras, and a sensor head with pan-tilt functionality featuring a thermal camera, a zoom camera and a radar sensor that is used for through-wall vital sign detection and monitoring.
The robot was successfully deployed during Enrich 2021, exploring a nuclear power plant and locating radiation sources. The combination of high mobility, various sensing capabilities, and advanced algorithms enabled Team Hector to win the 3D mapping and the radiation mapping award.
Alumni
These robots were used by Team Hector in the past but have since retired.